
Способы обеспечения движения, уборки и питания робота-пылесоса
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи. Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот. Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Самостоятельный возврат робота к месту зарядки – сложная задача, которую можно решить установкой передающего маяка.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд. Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс. Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Робот, различающий препятствия
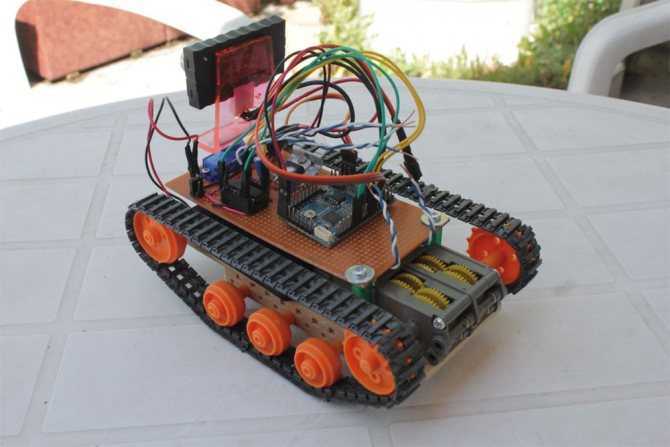
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.
Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.
Функционал приложения для синхронизации робота-пылесоса
С помощью приложения потребитель может воспользоваться следующими функциями:
- голосовое управление;
- выбор зон для уборки;
- расписание;
- выбор режима уборки (траектория движения, мощность);
- самодиагностика пылесоса.
Голосовое управление
Доступно не во всех моделях. Позволяет запускать или останавливать уборку, планировать её при помощи голосового ассистента смартфона (например, Google ассистент, Яндекс Алиса).
Выбор зон для уборки
Данная функция предусмотрена в тех моделях, где есть составление интерактивной карты. На экране смартфона пользователь может указать, какие комнаты нужно убирать, какие места — пропускать. В более простых моделях для этого используется магнитная лента.
Расписание
Данная функция позволяет составить расписание для проводимых уборок на 7 – 10 дней вперед. Удобно, ведь можно задать, что пылесос будет убираться в доме только тогда, когда все на работе (или на учебе). То есть он никому не будет мешать.
Выбор режима уборки
Позволяет задать траекторию движения (по периметру, зигзагом), а также мощность всасывания. В некоторых моделях ещё имеется возможность активировать автоматическую подзарядку для последующего завершения уборки в помещении.
Самодиагностика пылесоса
Приложение «напомнит» пользователю, когда нужно опустошить пылесборник, очистить фильтр или снять насадку для влажной уборки помещения. Также через приложение можно узнать текущий уровень заряда, примерное оставшееся время до окончания уборки помещения.

Разборка робота-пылесоса
Для очистки или мелкого ремонта, замены важных компонентов может потребоваться разборка. Сразу отметим, что снять фильтры, щетки или датчик не так сложно, как кажется на первый взгляд.
Если владелец электронного помощника уверен в своих знаниях и навыках, можно попробовать справиться с возникшими проблемами в работе автономного пылесоса самостоятельно.
Разбор корпуса устройства
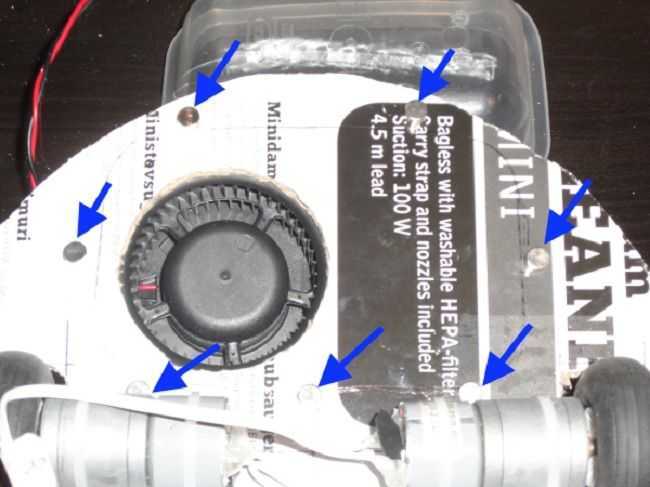
Сначала откройте крышку и открутите два винта под ней, как показано на фото.
Второй шаг — открыть маленькую крышку и открутить остальные винты.
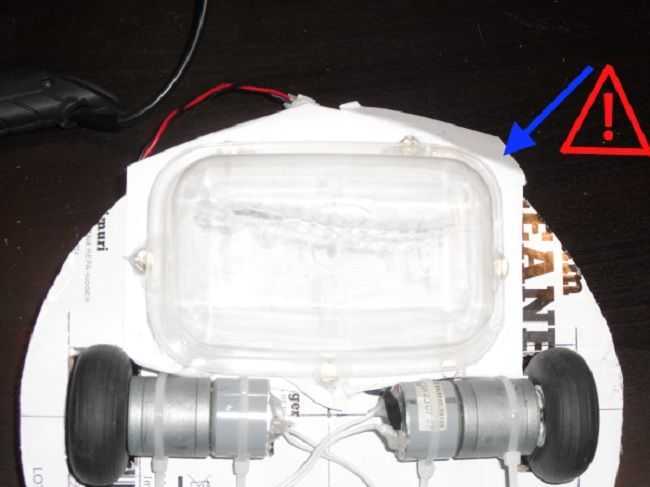
Затем можно снять часть пластикового корпуса и добраться непосредственно до самого лидара.
Эта часть демонтажа корпуса завершена. Далее приступаем к разборке лазерного дальномера.
Разборка лазерного дальномера
Сам лазер расположен напротив оптического датчика. Лазер выполнен в виде золотой гильзы с тремя проводами. Провода подключаются через 3-контактный разъем к плате лидара. Чтобы извлечь лазер, нужно открутить все черные винты.
После замены лазера его необходимо откалибровать! Для этого нужно направить робот-пылесос Xiaomi на базу после частичной сборки и посмотреть, быстро ли он ее найдет.
Как управлять процессом уборки
Управлять роботом-пылесосом Xiaomi можно со смартфона. Для этого есть приложение, в котором можно задавать график уборки, маршрут и контролировать параметры устройства. Приложение интуитивно покажет пользователю, как создать умную карту робота-пылесоса Xiaomi.
Чтобы осуществлять управление и контроль через приложение, необходимо выполнить следующие шаги:
- скачать приложение «Mi Home» для Android или IOS;
- выбрать сервер Европу, США или Сингапур, потому что на китайских серверах некоторые опции заблокированы;
- создать учетную запись либо совершить вход в уже существующий аккаунт;
- в пункте «Добавление устройства» выбрать Mi Robot;
- на корпусе пылесоса нажать и удерживать в течение 5 секунд иконку с изображением дома до звукового сигнала. Это будет свидетельствовать об успешном соединении приложения и устройства;
- выбрать Mi Robot и указать используемую сеть Wi-Fi;
- задать основное местоположение устройства и завершить настройку.
Роботы-пылесосы Xiaomi различаются по наличию функции влажной уборки. В каждой модели есть разделение на полную и частичную уборку.
При полной уборке происходит построение карты, разделяя большое помещение на квадраты. Затем по зигзагообразной траектории производится уборка каждого квадрата по очереди. Каждый квадрат робот-пылесос Xiaomi проходит повторно. После завершения робот возвращается на базу для зарядки. Если док-станцию переместить на другое место, то робот-пылесос вернется на то место, откуда началась уборка.
Частичная уборка представляет собой очистку поверхности площадью 1,5х1,5 метра. Для этого нужно поставить робот-пылесос Xiaomi на нужное место, нажать и подержать 5-6 секунд кнопку «Домой». Устройство начнет уборку и по её завершению вернется на базу.
Возможные трудности
При использовании робота-пылесоса могут возникнуть некоторые трудности. Зачастую они имеют простые решения.






- робот-пылесос больше не отображается в приложении. Причиной является потеря связи между утилитой и устройством. Как правило, это может произойти при изменении сети Wi-Fi, при обновлении прошивки. Чтобы устранить проблему, необходимо сделать сброс настроек робота-пылесоса. Для этого нужно одновременно нажать и удерживать кнопку включения и «Домой» до голосового оповещения. После этого через приложение заново добавить устройство;
- зависание устройства. При этом робот-пылесос не реагирует на команды с приложения и на нажатие кнопок на панели. Поможет перезагрузка при помощи кнопки Reset;
- робот перестал заряжаться. Помимо отсутствия напряжения в сети, к которой подключена док-станция, могут засориться контакты. После очистки от загрязнения процесс зарядки будет восстановлен;
- робот-пылесос Xiaomi не рисует карту. Причиной может стать низкий заряд батареи.
Процесс сборки
Пошаговый процесс сборки робота-пылесоса Ардуино:
- Разложить компоненты конструкции будущего изделия на ровной поверхности для определения взаимного расположения и габаритов корпуса.
- Вырезать из картона круглое основание.
- Выполнить на детали прорези для боковых колес, которые располагаются по поперечной оси симметрии.
- Закрепить электрические приводы колес пластиковыми хомутами к корпусу.
- Прорезать канал для забора воздуха и зафиксировать клеем турбину над полученным окном. Узел крепится на противоположной от двигателей ходовой части стороне поддона.
- Разметить зону установки контейнера для пыли, который размещается над окном с роторным рабочим колесом.
- Установить и закрепить термическим клеем на внутренней части магниты (по предварительно размеченному контуру резервуара для пыли). Ответные магнитные элементы размещаются через лист бумаги на противоположной стороне поддона. Емкость для пыли приклеивается к магнитам, которые плотно прижимаются к боковой поверхности резервуара. Лист бумаги удаляется, коробка удерживается на запланированной монтажной точке взаимным притяжением магнитов.
- Закрепить на верхней плоскости поддона аккумуляторную батарею и контроллер Ардуино. Допускается установка элементов в направляющие узлы, изготовленные из древесины или пластика. Пользователи используют стандартные блоки управления Ардуино, часть владельцев самостоятельно корректирует прошивку микропроцессора путем подключения изделия к компьютеру.
- Разместить блок H-Bridge поверх контроллера и соединить электронику пылесоса с аккумулятором. Для соединения кабелей применяется пайка и установка коммутационных штекеров.
- Подключить электрические двигатели к выводам блоков управления.
- Вырезать картонные заготовки для фронтального бампера. Детали монтируются на передней части корпуса, точка соединения допускает перемещение бампера после столкновения робота с препятствием.
- Припаять отрезки кабеля к прямоугольным жестяным пластинам (требуется изготовить 2 элемента). Металлические пластинки устанавливаются на расстоянии от внутренней стороны импровизированных бамперов. На внутренней поверхности бампера наклеивается фольга, на которую подается положительное напряжение от батареи. При столкновении пластинка соединяется с фольгой и работает как датчик препятствия. В сигнальной цепи от пластины устанавливается дополнительное сопротивление, снижающее риск ложных срабатываний.
Для очистки воздуха от пыли применяется фрагмент от кухонной салфетки, изготовленной из волокнистого синтетического материала. Элемент устанавливается под основанием контейнера пылесборника и удерживается магнитами. В самом контейнере прорезается прямоугольный канал, через который затягивается воздух с пылью. Для регулировки зазора между резервуаром и напольным покрытием применяется сменное дистанционное кольцо из картона или пробки.
Разбор корпуса LDS
Сначала я снял переднюю верхнюю панель корпуса. Для этого потребуется небольшая отвертка или специальный инструмент
Панель крепится к корпусу с помощью девяти защелок.
Его следует снимать очень осторожно, чтобы не повредить детали. Осторожно вставьте отвертку под край панели и отсоедините крепежные элементы.
На обратной стороне крышки вы увидите девять защелок, с помощью которых она крепится к пылесосу.
Затем снимите крышку пылесборника
Для этого выкрутите шесть саморезов, крепящих поворотные панели.
Выкрутите шесть винтов, крепящих крышку лидара. Три из них скрыты под резиновыми колпачками, которые необходимо снять, не повредив корпус. Это можно сделать с помощью пинцета. Снимите крышку лазерного дальномера, под которой находится его корпус.
Чтобы снять лидар, открутите четыре крепежных винта. Теперь вы можете осторожно извлечь датчик из корпуса.
Под лазерным дальномером виден разъем, с помощью которого лидар подключается к материнской плате.
Отказы датчиков могут быть разными. Не всегда требуется замена всего датчика. Возможно, будет достаточно удалить некоторые компоненты и установить новые.
Картонный робот-пылесос на Arduino

Имея в наличии все детали и инструменты такого робота можно собрать всего за 2 часа. Конечно, такой робот не заменит вам настоящий пылесос, но вы будете приятно удивлены сколько пыли он может собрать с вроде бы чистого пола.
Материалы: — Arduino— Модуль управления двигателем Motor-shield (H-Bridge)— Два мотора с редукторами— Пара колес— Power-bank 5 вольт, или другой источник питания— Турбинка охлаждения для компьютера 5 вольт (не вентилятор)— Сильные магниты— USB кабель— Кабель с разъемом питания для Arduino— Провода для соединения контактов Arduino— Картон плотный— Клеевой пистолет— Кусочек жести (например, от консервной банки)— Пластиковая коробка (служит емкостью для пыли)

На картоне определяется примерно расположение деталей, и вырезается круг подходящего размера (шасси пылесоса).

На дне будущего робота вырезают отверстия под колёса, и под турбинку. Моторы крепят к картону с помощью пластиковых стяжек.
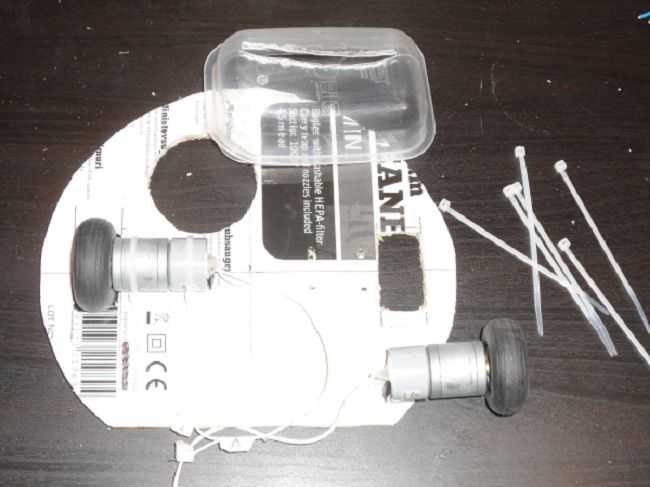
Далее, термоклеем к шасси закрепляют турбину.

Получается так, что турбина на верхней части картона, моторы — внизу.

На нижней стороне помечается контур пластиковой коробки (которая будет собирать пыль), вокруг этого контура автор делает сквозные отверстия и отмечает расположение магнитов. Магниты будут удерживать коробку на шасси.
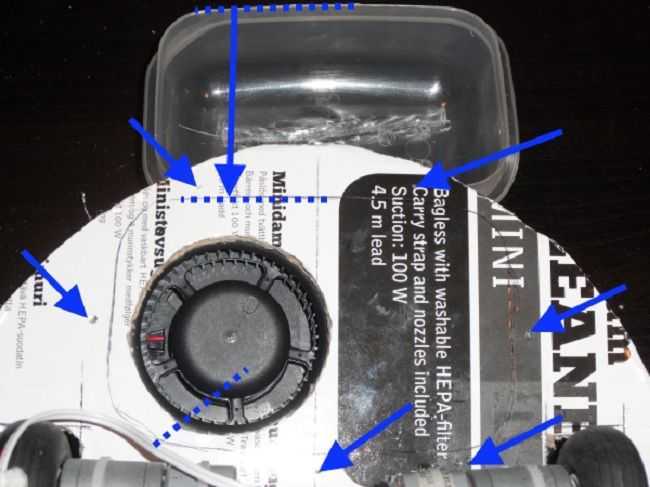
На верхней стороне шасси магниты приклеивают на ранее помеченных местах.

Теперь, с магниты прикладывают с нижней стороны, предварительно подложив лист бумаги под них.
Коробку для сбора пыли устанавливают между магнитами и приклеивают к ним.
Далее, уже на верхней стороне картона приклеивается аккумулятор и крепления для Arduino. В качестве креплений автор использует куски деревянных шпажек.

Теперь можно установить motor-shield и Arduino в крепления. Провода питания и Arduino отрезают до нужного размера. Провода питания рекомендовано спаять и изолировать. После чего их подключают к Arduino, турбине, аккумулятору и motor-shield.

Из полосок имеющегося картона сгибают и склеивают бамперы полукругом.

Бамперы крепят клеем к с боков шасси. Также шасси предварительно немного подрезали так чтоб установленные бамперы могли придавится к нему при столкновении.

Далее, берут два проводника и соединяют их с кусочками жести термоклеем.

Куски жести приклеивают к бамперам, а их провода подключат к Arduino (к контактам 5 и 8). Вдобавок напротив них клеем закрепляют контакты еще двух проводников, которые присоединяют к контактам GND Arduino.

В качестве фильтра пыли используют вырезанный прямоугольник из кухонной салфетки. Фильтр кладут снизу шасси и закрепляют его коробкой с магнитами.

В коробке проделывают длинное отверстие с краями выгнутыми наружу. К коробке дополнительно приклеивают округлую опору (кусок пластика) так чтобы край отверстия был на расстоянии 1 мм над полом когда робот будет стоять на колесах и опираться на опору. Высота этой опоры регулирует проходимость робота.

Высокие стенки коробки можно укоротить переклеиванием магнитов.

Программа для motor-shield и Arduino
Пример работы пылесоса:





Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
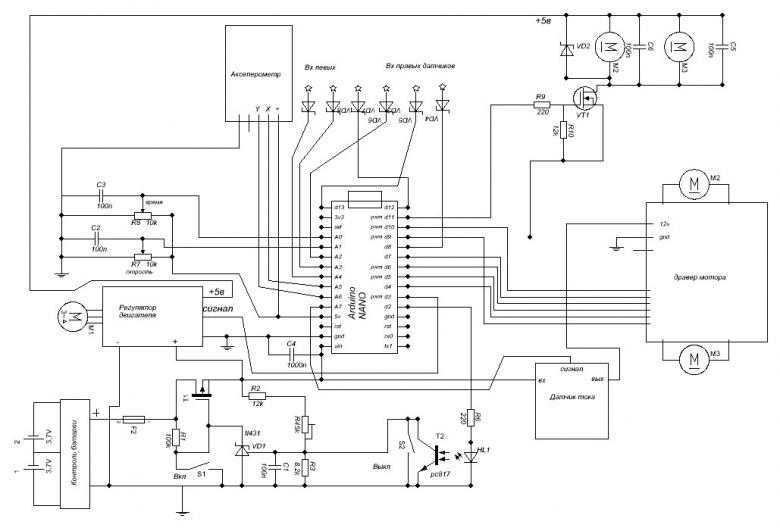
Всё это собрать по такой схеме:
Схема сборки робота-пылесоса
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.
Вот схема питания этого робота:
Схема питания
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Теги
сделать, робот-пылесос, своими, руками, идеи, сборки
-
12-02-2019, 10:26
Умение программировать роботов требует понимания и представлений о соответствующих языках. Начать…
-
16-01-2019, 18:28
Во всём мире люди тратят на уборку в среднем более трех часов в неделю. Одна из самых…
-
4-12-2018, 14:32
Робот-пылесос становится барменом (+ видео)
Пивоваренная компания Stella Artois разработала автоматизированную робо-технологию (Bartending…
-
23-04-2016, 16:02
На Indiegogo принимают заказы на первую партию конструкторов для самостоятельной сборки…
-
8-12-2015, 14:11
Робот, похожий на пылесос, собирает мячи для гольфа (+ видео)
Бродить по тренировочному полю для гольфа, собирая нескончаемую россыпь мячей, это довольно трудная…
-
23-12-2015, 17:13
Новейший роботизированный пылесос от LG, известный как Hom-Bot Turbo+, будет иметь впечатляющий…
-
13-03-2018, 09:38
Новое видео на YouTube демонстрирует мировой рекорд по скорости сборки роботом кубика Рубика. Новое…
-
19-01-2015, 09:27
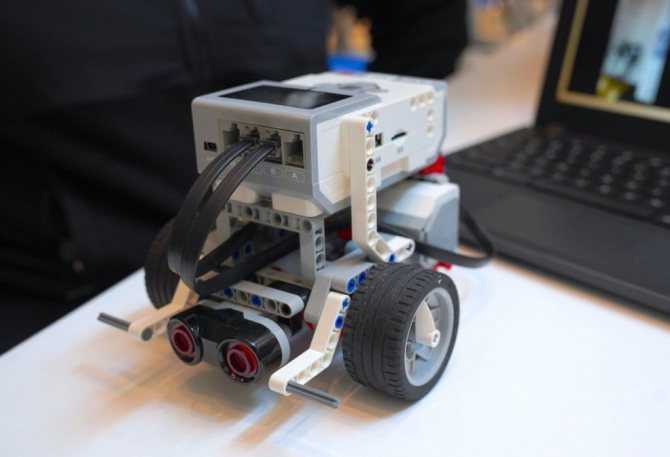
Мой робот сможет защитить меня от врагов? Ну или хотя бы тапочки принести?
Первое маловероятно. Точнее, нет ничего невозможного, но для начала лучше поставить перед собой более простую цель. Например, на основе самой Arduino можно собрать множество движущихся роботов: они могут просто двигаться вперед и назад, по сложной заданной траектории или по нарисованной линии. Даже робот, который автономно избегает препятствий или как-то меняет свое поведение при приближении к разным объектам, — посильная задача. Первый робот также сможет что-то включать и выключать, ориентируясь на уровень освещения, выполнять определенные действия в определенное время, установленное таймером, или нажатием кнопки.
Что ж, в будущем, если вы продолжите посвящать себя робототехнике, вы сможете создать как робота-помощника, так и робота-безопасности, который может стрелять. Также вы можете собрать робот-пылесос своей модели. В России и во всем мире постоянно проводятся соревнования по робототехнике, на которых участники роботов дерутся, играют в футбол, участвуют в соревнованиях и просто демонстрируют свои незаурядные способности. Например, на РобоФесте, ежегодно организуемом фондом «Вольное Дело», можно увидеть сотни разных роботов.
Послесловие
Несмотря на то, что есть гораздо более сложные и точные (в том числе дорогие) проекты, данный проект очень интересен и имеет отличный потенциал для практического применения. Такие конструкции нельзя использовать в непосредственном контакте с человеком из-за недостаточной точности самой концепции. А вот промышленность, медицина и т.д. Для задач без повышенных требований к точности движений в суставах наша роботизированная рука вполне подойдет. Ну а с точки зрения дальнейшей «апгрейда» руки тут поле вообще не вспахивается. Начиная с беспроводного управления, заканчивая заменой приводов, габаритов, развитием дополнительных степеней свободы.
Вот почему я люблю Arduino: вы можете очень быстро и за небольшие деньги собрать макет или прототип устройства, которое не только легко программировать, но и может выполнять действительно интересные задачи.
Замена двигателя
Далее я покажу вам, как заменить мотор лидара в Xiaomi Roborock. Чтобы разобрать его, необходимо снять приводной ремень, открутить два самореза
Это следует делать очень осторожно, резьбу этих винтов легко сорвать
Теперь отсоедините деталь от корпуса, отсоединив разъем. Будьте осторожны, чтобы не повредить гнездо подключения двигателя.
Кроме того, я снял верхнюю крышку лидара, чтобы посмотреть, что у него внутри. Для этого я открутил три винта, удерживающие крышку.
Внутренняя часть датчика также может быть изменена. Это касается и самого лазера, но его переустановка требует специальных навыков и знаний. Это будет непросто сделать неподготовленному пользователю. Я рекомендую использовать только оригинальные запасные части, чтобы избежать проблем с навигацией.
После удаления неисправного двигателя можно приступать к установке новой запасной части для лидара в обратном порядке.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.





Платформа Ардуино 4WD с двигателями, колесами и рамой без электронных компонентов
4WD платформа для Ардуино с необычным видом крепления элементов

Конструктор машинки Ардуино на платформе 4WD с пультом управления Bluetooth и PS2
Типовой набор 4WD машинки с Ардуино, шилдами и основными датчиками
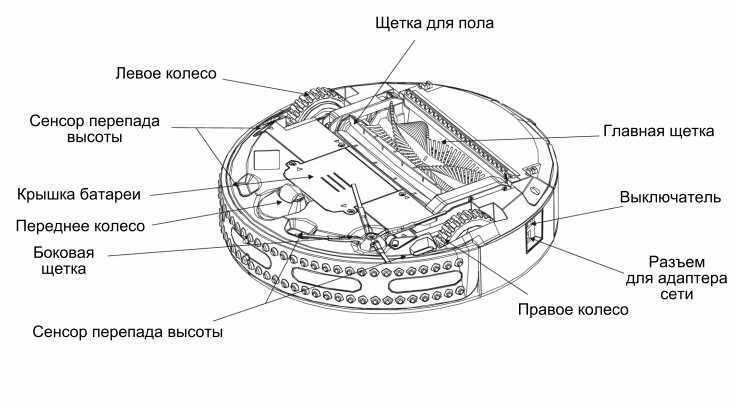
Как работает робот пылесос.
Принцип работы умного пылесоса следующий. Составив карту местности, он отправляется выполнять уборку, как только получает команду.
Команда может быть отправлена с экрана управления на верхней части робота пылесоса или удаленно с помощью приложения для смартфона.
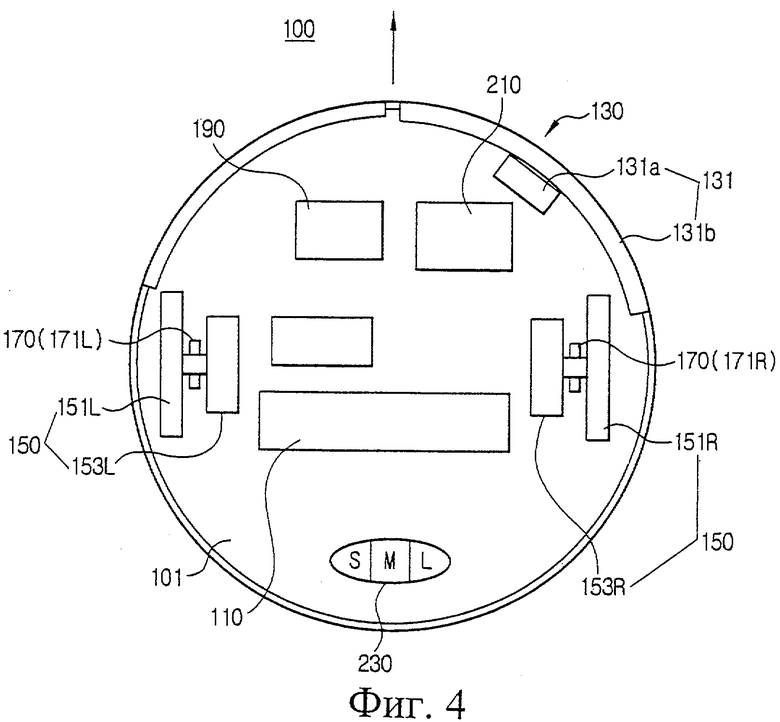
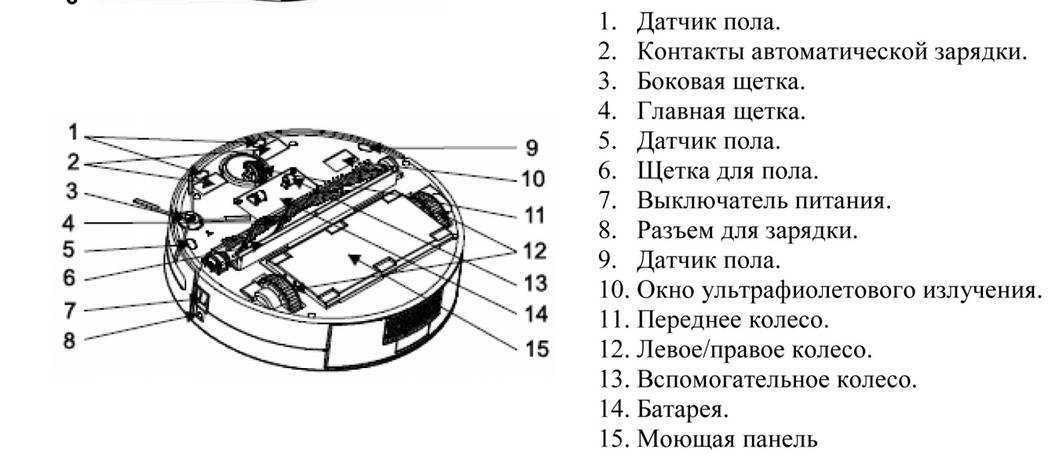
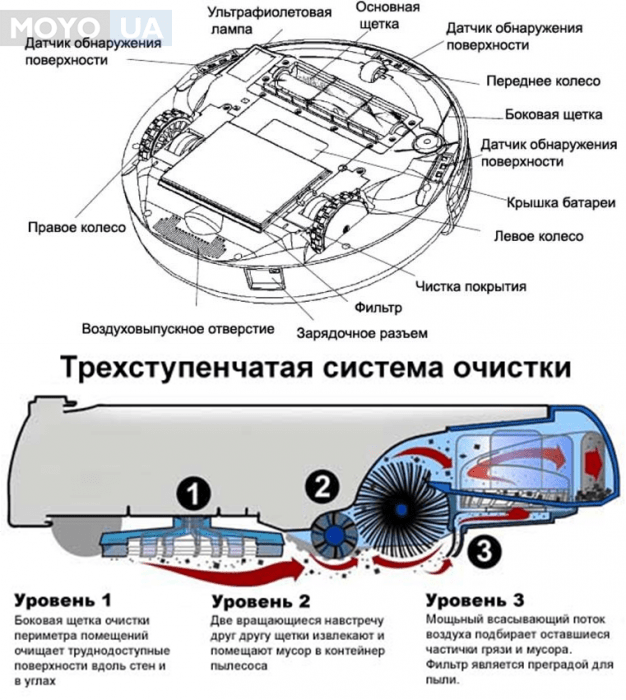
Боковые щетки робота пылесоса собирают пыль и мусор с пола. Их главное назначение – проходить углы, места рядом с плинтусами и мебелью. Они выступают за корпус пылесоса, чтобы при приближении к мебели – он не бился об нее.
Захватив пыль и мусор боковые щетки направляют это все к основной щетке, которая затягивает пыль и мусор к всасывающему устройству внутри пылесоса.
Пыль и мусор оседают в отсеке для мусора, а воздух, захваченный пылесосом, проходит очистку через HEPA фильтр и возвращается обратно в комнату.
После завершения программы уборки, робот пылесос возвращается на базу (станцию зарядки) и остается там до новых поручений. После уборки можно извлечь отсек для мусора, чтобы выкинуть пыль, шерсть и прочий мусор.
Как работает робот пылесос на ковре?
Если у Вас дома много ковров, не ожидайте многого от вашего робота пылесоса при их уборке. У умных пылесосов как правило низкая мощность всасывания (что логично, учитывая их размеры). Робот пылесос соберет лишь крупный мусор и пыль из ковра с низким ворсом, а если у Вас ковры с высоким ворсом – робот пылесос не справится с их уборкой.
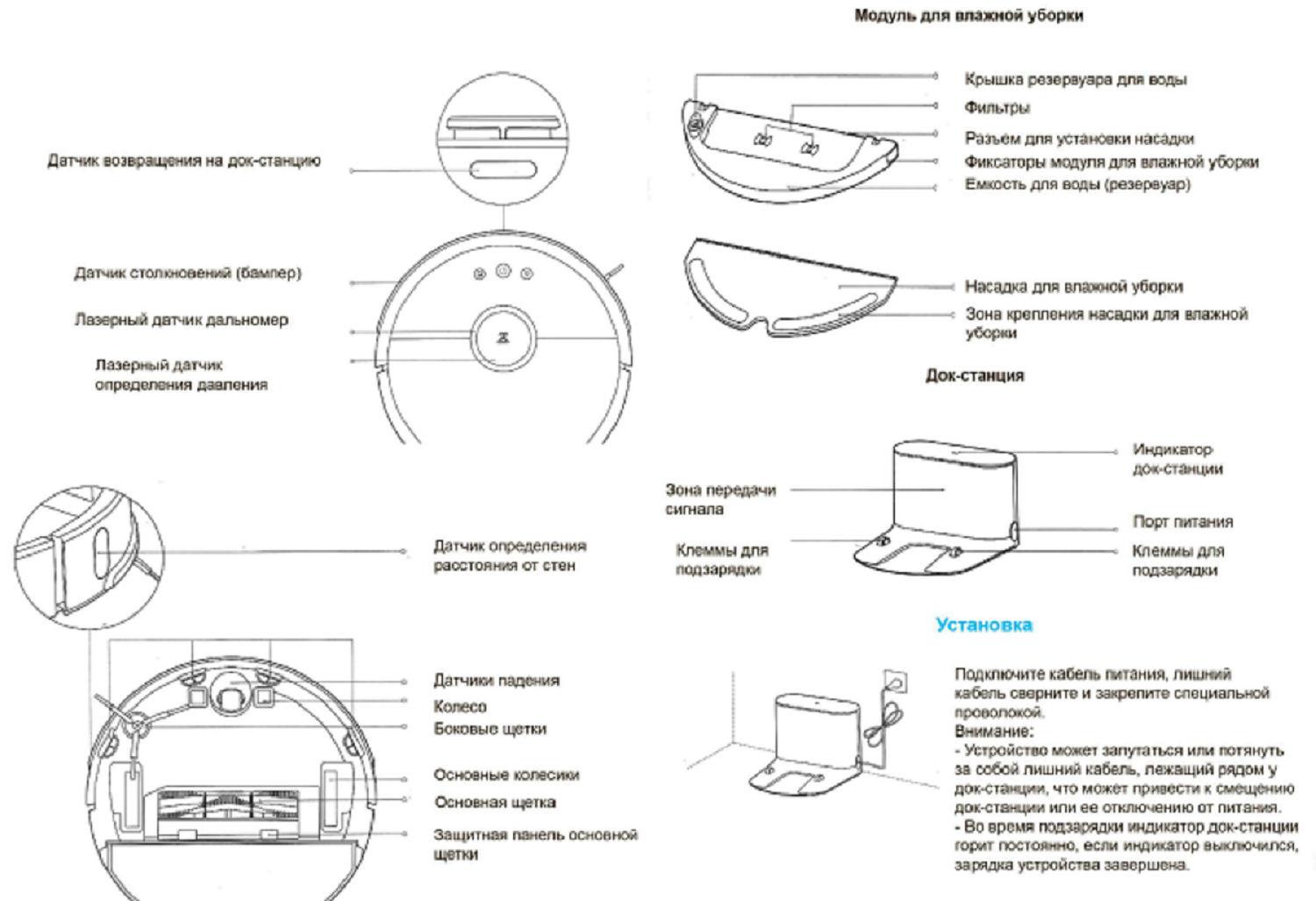
Принцип работы пылесоса с влажной уборкой.
На некоторых роботах пылесосах предусмотрена функция влажной уборки. Принцип работы здесь очень простой – на нижнюю часть моющего пылесоса крепится швабра, которую можно предварительно намочить. Таким образом умный моющий пылесос будет еще и протирать полы влажной тряпкой вместе с обычной уборкой.
Однако у данной функции есть один очень существенный минус. Вы можете намочить швабру только один раз перед уборкой. В процессе работы смачивать ее уже не получится, робот сбрасывает карту помещения и текущую программу уборки при отрывании его от пола. Салфетка помогает собрать мелкую пыль, включая муку, мелкий песок, соль. Для полноценной мойки полов она не подойдет.
Дополнительные опции в конструкции робота пылесоса.
К дополнительным улучшениям можно отнести как перепрошивку программы робота пылесоса, так и незначительные улучшения в конструкции.
Главное улучшение, которое можно внести – улучшить боковые щетки. Стандартно боковые щетки идут с тремя щетинками, однако можно купить сменные боковые щетки с шестью щетинками.
Например, такие как вы видите на фото ниже. Это Боковая щетка Topperr IRA 2 для робота пылесоса iRobot Roomba серий 500, 600 и 700. Как Вы видите у нее в 2 раза больше щетинок.
Благодаря им он еще лучше проходит участки у плинтусов, у основания мебели, а самое главное – углы – главную головную боль для роботов пылесосов.
* * *
Отлично! Теперь Вы знаете, как работает робот пылесос, как он устроен, принцип его действия, как работает моющий пылесос. Мы не стали подробно рассматривать технические детали прошивок в данной статье, но обязательно вернемся к этой теме.
А если Вам нужен фильтр или щетка для робота пылесоса на замену– Вы найдете их на нашем сайте в категории — > Аксессуары для роботов-пылесосов
Подготовка к практической реализации проекта
Рассмотрим применение описанных выше принципов к платформе Arduino Mega 2560. Процесс строительства состоит из нескольких этапов:
- Подготовка инструментов и материалов,
- Подготовка и заготовка материалов, подготовка инструментов и оборудования, строительство корпуса с колесами и отсеком для отходов, пылесборника и турбины,
- установка датчиков и микроконтроллера, двигателей с редукторами, аккумулятора, щеток,
- выполнение электрических соединений,
- Ввод программы в Arduino, определение согласованности датчиков,
- Проверка функциональности робота-пылесоса и его способности к самозарядке.
Концепция реализуется с использованием следующих материалов и инструментов:
- Контроллер Arduino — 1 штука, с драйверами,
- Фанерный лист (или картон) — 1 м2,
- картон (картон, картонная коробка, картонная коробка, картонная коробка, картонная коробка, картонная коробка — 3 шт,
- Источник питания — 4 батареи 18 В, индикатор заряда для них, зарядное устройство,
- инфракрасные датчики — 4 шт, контактные датчики — 2 шт,
- Моторы: 1 шт. для турбины и 1 шт. для щетки; 2 мотор-редуктора обеспечивают движение,
- корпус из поливинилхлорида — 1 шт,
- клей — 1 упаковка, саморезы — 10 штук, клейкая лента — 1 штука, набор магнитов,
- набор отверток и бит, плоскогубцы, кусачки, карандаш, линейка, шуруповерт, лобзик.
- Автомобильный пылесос, как следует из названия, предназначен для уборки салона автомобиля. Его компактные размеры обеспечивают доступ в самые труднодоступные места. Некоторые пылесосы могут всасывать жидкости, что особенно полезно зимой, когда на ковре стоят лужи талого снега.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.



